Linea involucri Doypack in capsis

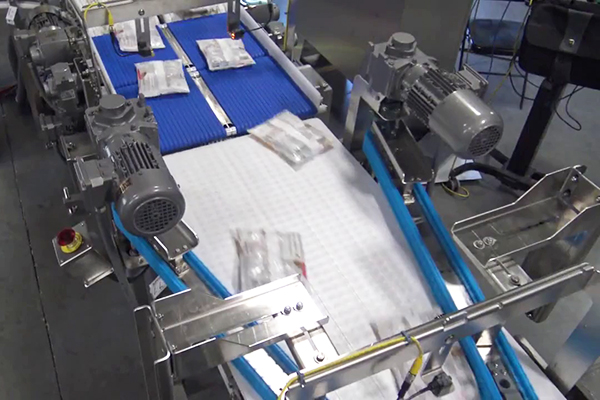
Haec linea productionis automatica comprehendit detectorem radiographicum, reiectorem saccorum, instrumentum ad saccos applanandos, divisorem, transportatorem saccorum, calefactorem et refrigerationem spiralem, machinam ad saccos inscriptionandos, erectorem capsularum, systema roboticum ad capsulas implendas, et systema roboticum ad palletizandas.
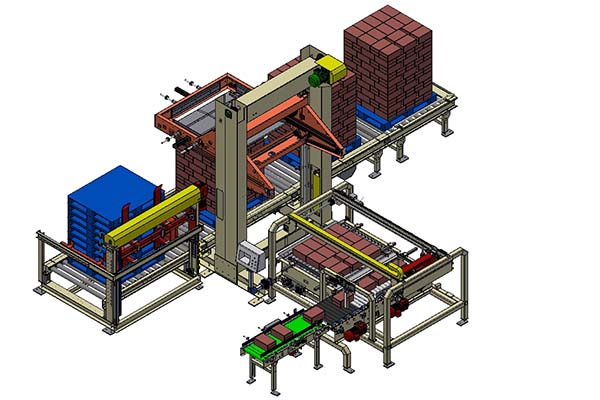
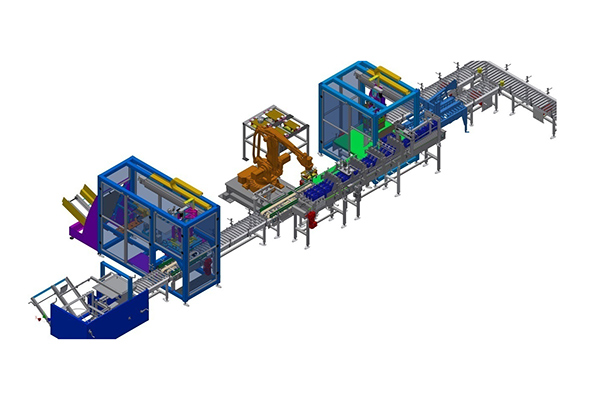
Haec completa linea ciborum involucrorum implendorum instructa est linea integrata transportatoria productorum, inspectione visuali, transportatorio capsularum, impletione robotica, mechanismo partitionis collocandae, structura ductoris sarcinandi, etc. Machina hospitis implendi utitur roboto manu aranearia et prehensore suctionis vacui ad producta capienda. Transportatorium producti alendum camera inspectionis visualis instructum est ad positionem et angulum producti in transportatorio detegendum, et robotus productum sequetur et prehendet. Manus aranearia primum productum prehendit et in structuram ductoris sarcinandi ponit, quae totum stratum producti in totam lineam comprimit antequam in capsulam imponat. Instrumentum cum instrumento collocandi tabulas partitionis compatibile est.
Dispositio systematis sarcinandi completa

Configuratio principalis
| Bracchium roboticum | ABB/KUKA/Fanuc |
| Motor | SEW/North/ABB |
| Motor servo | Siemens/Panasonic |
| Variator visionis (VFD) | Danfoss |
| Sensorium photoelectricum | AEGROTUS |
| Tactus velum | Siemens |
| Apparatus humilis tensionis | Schneider |
| Terminalis | Phoenix |
| Pneumatica | FESTO/SMC |
| Discus sugens | PIAB |
| Ferens | KF/NSK |
| Antlia vacui | PIAB |
| PLC (Programmata Computatralis) | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Lamina catenae/catena | Intralox/Rexnord/Regina |
Descriptio structurae principalis