Linea sarcinandi capsarum coordinatarum servo (cum partitione chartacea)

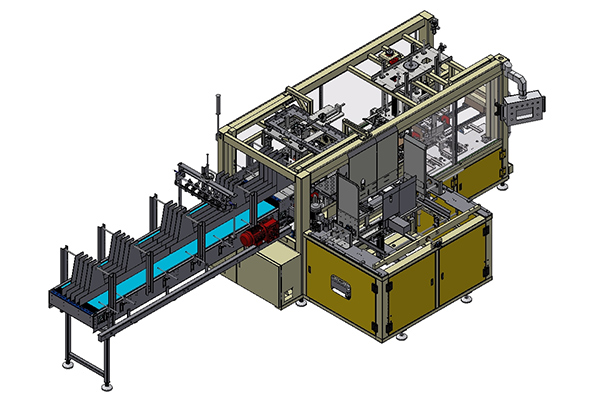
Linea productionis involucrorum constat ex divisore celerrimo, linea vehendi productum, linea vehendi prehendendi, robot automatico (Hbot), mechanismo movente biaxi, linea vehendi capsas, mechanismo detectionis, prehensore partitionis chartacei, systemate alimentationis partitionis chartacei, coordinata servo, prehensore lagenarum, et saepto protectivo. Divisor celerrimus producta in plures vias dividit, dum mechanismus movente biaxi transitum productorum accelerat. Postquam productum ad stationem partitionis chartacei pervenit, robot automaticus Scar partitionem chartaceam in producta disposita imponit. Producta ad convectorem selectorium perveniunt. Deinde, producta a prehensore colliguntur et in capsam chartaceam ponuntur, et convector capsam productum continentem transportat.
Dispositio systematis sarcinandi completa

Configuratio principalis
| Bracchium roboticum | ABB/KUKA/Fanuc |
| Motor | SEW/North/ABB |
| Motor servo | Siemens/Panasonic |
| Variator visionis (VFD) | Danfoss |
| Sensorium photoelectricum | AEGROTUS |
| Tactus velum | Siemens |
| Apparatus humilis tensionis | Schneider |
| Terminalis | Phoenix |
| Pneumatica | FESTO/SMC |
| Discus sugens | PIAB |
| Ferens | KF/NSK |
| Antlia vacui | PIAB |
| PLC (Programmata Computatralis) | Siemens /Schneider |
| HMI | Siemens /Schneider |
| Lamina catenae/catena | Intralox/Rexnord/Regina |
Descriptio structurae principalis




Plura spectacula videographica
- Impactor capsarum servo coordinatis pro ampullis vitreis cum partitione chartacea